

机械臂——六轴机械臂操作空间运动分析
目录
机械臂建模分析:https://blog.csdn.net/Kalenee/article/details/81990130
MoveIt规划下的关节空间运动分析:http://www.guyuehome.com/752
一、简介
在ROS平台下使用MoveIt进行机械臂控制时,默认调用AddTimeParameterization模块完成轨迹的运动规划,输出结果为各关节在对应时间帧下的关节位置与角速度,并没有机械臂末端的运动信息,为此需要通过rosbag完成运动规划的记录并结合Matlab完成操作空间的运动分析。
二、雅可比矩阵
2.1 数学意义
数学上雅可比矩阵(Jacobian matrix)是一个多元函数的偏导矩阵。设有六个拥有六个变量函数如下:

对六个函数微分后得:

可简写为


其中

2.2 机械臂的雅可比矩阵
机械臂的雅可比矩阵J既可表示从关节空间向操作空间的速度传递的线性关系,也可看成是微分运动转换的线性关系。
对于六轴机器人,其雅可比矩阵J(q)是
三、操作实现
3.1 记录轨迹
在工作空间下创建bag文件,将记录轨迹的.bag文件及脚本放置在该目录下。
(1)编写节点利用rosbag记录轨迹
rosbag api官方教程:http://wiki.ros.org/rosbag/Code%20API
#include <ros/ros.h>
#include <rosbag/bag.h>
#include <rosbag/view.h>
#include <std_msgs/Bool.h>
#include <std_msgs/Float64MultiArray.h>
#include <string>
#include <trajectory_msgs/JointTrajectory.h>
ros::Subscriber write_sub, motion_sub;
int nums;
bool writeJudge;
rosbag::Bag writeRobot, writePos, writeVel;
void data_process(trajectory_msgs::JointTrajectory getData) {
writeRobot.write("/moveit/JointTrajectory", ros::Time::now(), getData);
for (int j_num = 0; j_num < 6; j_num++) {
std_msgs::Float64MultiArray pos_data, vel_data;
for (int i = 0; i < getData.points.size(); i++) {
pos_data.data.push_back(getData.points[i].positions[j_num]);
vel_data.data.push_back(getData.points[i].velocities[j_num]);
}
writePos.write("pos" + std::to_string(j_num), ros::Time::now(), pos_data);
writeVel.write("val" + std::to_string(j_num), ros::Time::now(), vel_data);
}
}
void write_callback(const std_msgs::Bool::ConstPtr &data) {
if (data->data) {
writeJudge = true;
std::string robotFileName = "bag/motion";
robotFileName += std::to_string(nums);
robotFileName += ".bag";
writeRobot.open(robotFileName, rosbag::bagmode::Write);
std::string posFileName = "bag/motion_pos";
posFileName += std::to_string(nums);
posFileName += ".bag";
writePos.open(posFileName, rosbag::bagmode::Write);
std::string velFileName = "bag/motion_vel";
velFileName += std::to_string(nums);
velFileName += ".bag";
writeVel.open(velFileName, rosbag::bagmode::Write);
} else {
writeJudge = false;
writeRobot.close();
writePos.close();
writeVel.close();
nums++;
}
}
void motion_callback(const trajectory_msgs::JointTrajectory::ConstPtr &data) {
if (writeJudge) {
std::cout << "write" << std::endl;
data_process(*data);
}
}
int main(int argc, char **argv) {
ros::init(argc, argv, "record");
ros::NodeHandle nh;
nums = 1;
writeJudge = false;
write_sub =
nh.subscribe<std_msgs::Bool>("/robot/bagWirte", 1, write_callback);
motion_sub = nh.subscribe<trajectory_msgs::JointTrajectory>(
"/moveit/JointTrajectory", 10, motion_callback);
ros::spin();
}
(2)使用脚本将.bag文件转为.csv文件
创建脚本bagtocsv.sh
#! /bin/bash
echo "Enter bag name"
read bagname
for topic in `rostopic list -b $bagname.bag`;
do rostopic echo -p -b $bagname.bag $topic >$bagname-${topic//\//_}.csv;
echo "finish"
done
cd到该目录下,用bash命令执行,根据提示输入.bag文件的名字。
3.2 轨迹处理
Matlab程序
clear;
%% 前期准备
%启动工具箱
startup_rvc;
%角度转换
du=pi/180; %度
radian=180/pi; %弧度
%关节长度,单位m
L1=0.40;L2=0.39;L3=0.17;L4=0.20;L5=0.08;
%% 建立数学模型
% DH法建立模型,关节角,连杆偏移,连杆长度,连杆扭转角,关节类型(0转动,1移动)
L(1) = Link( 'd',L1 , 'a',0 , 'alpha',-pi/2, 'offset',0 );
L(2) = Link( 'd',0 , 'a',-L2, 'alpha',0 , 'offset',pi/2 );
L(3) = Link( 'd',0 , 'a',0 , 'alpha',pi/2 , 'offset',0 );
L(4) = Link( 'd',L3+L4 , 'a',0 , 'alpha',-pi/2, 'offset',0 );
L(5) = Link( 'd',0 , 'a',0 , 'alpha',pi/2 , 'offset',0 );
L(6) = Link( 'd',L5 , 'a',0 , 'alpha',-pi/2, 'offset',0 );
plotopt = {'noraise', 'nowrist', 'nojaxes', 'delay',0};
tool_char=[1 0 0 0;
0 1 0 0;
0 0 1 0;
0 0 0 1];
six_link=SerialLink(L,'name','six link','tool',tool_char);
%% 显示机械臂
figure('name','机器臂')
hold on
six_link.plot([0 0 0 0 0 0], plotopt{:});
hold off
%% 计算雅可比矩阵
syms theta1 theta2 theta3 theta4 theta5 theta6;
j_trans = six_link.jacob0([theta1 theta2 theta3 theta4 theta5 theta6],'trans');
save('JacobData','j_trans');
%% 读取关节运动参数
%获取关节角度
j1 = csvread('robotMotion_pos-pos0.csv');
j2 = csvread('robotMotion_pos-pos1.csv');
j3 = csvread('robotMotion_pos-pos2.csv');
j4 = csvread('robotMotion_pos-pos3.csv');
j5 = csvread('robotMotion_pos-pos4.csv');
j6 = csvread('robotMotion_pos-pos5.csv');
%获取角速度
j_v = zeros(6,length(j1));
j_v(1,:) = csvread('robotMotion_vel-val0.csv');
j_v(2,:) = csvread('robotMotion_vel-val1.csv');
j_v(3,:) = csvread('robotMotion_vel-val2.csv');
j_v(4,:) = csvread('robotMotion_vel-val3.csv');
j_v(5,:) = csvread('robotMotion_vel-val4.csv');
j_v(6,:) = csvread('robotMotion_vel-val5.csv');
%% 计算末端运动参数
eff_p = zeros(3,length(j1));
eff_v = zeros(3,length(j1));
for i=1:1:length(j1)
theta1 = j1(i);
theta2 = j2(i);
theta3 = j3(i);
theta4 = j4(i);
theta5 = j5(i);
theta6 = j6(i);
% 计算末端位置
eff_p(:,i) = six_link.fkine([theta1 theta2 theta3 theta4 theta5 theta6]).t;
% 计算末端速度
eff_v(:,i) = double(subs(j_trans))*j_v(:,i);
end
%% 画图
time = csvread('robotMotion_time.csv');
hold on;
figure('name','关节空间运动分析')
subplot(2,1,1);
plot(time,j1,time,j2,time,j3,time,j4,time,j5,time,j6);
subplot(2,1,2);
plot(time,j_v(1,:),time,j_v(2,:),time,j_v(3,:),time,j_v(4,:),time,j_v(5,:),time,j_v(6,:));
hold off;
hold on;
figure('name','工作空间运动分析')
subplot(2,1,1);
plot(time,eff_p(1,:),time,eff_p(2,:),time,eff_p(3,:));
subplot(2,1,2);
plot(time,eff_v(1,:),time,eff_v(2,:),time,eff_v(3,:));
hold off;
3.3 结果
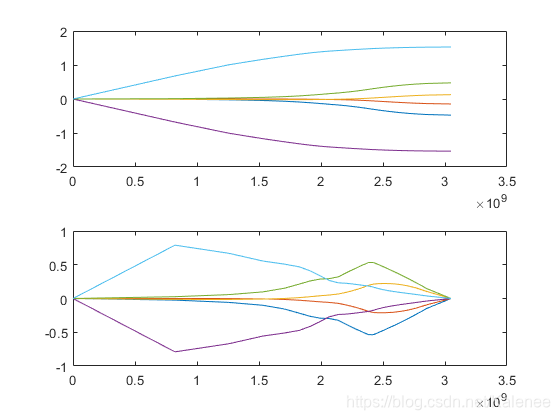

关节空间运动分析
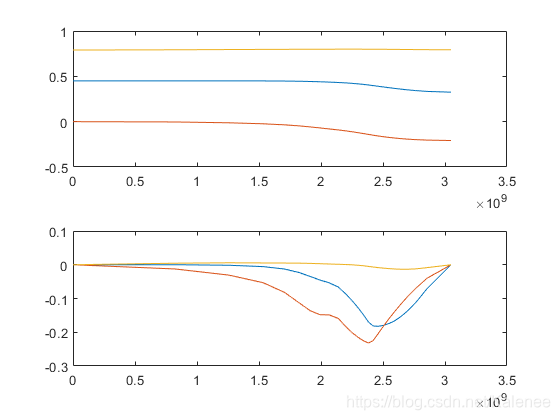
工作空间运动分析
参考:
《机器人技术基础》
转载自:https://blog.csdn.net/Kalenee/article/details/83904997





