边缘检测算法原理
边缘检测算法有如下四个步骤:
滤波:边缘检测算法主要是基于图像强度的一阶和二阶导数,但导数的计算对噪声很敏感,因此必须使用滤波器来改善与噪声有关的边缘检测器的性能.需要指出,大多数滤波器在降低噪声的同时也导致了边缘强度的损失,因此,增强边缘和降低噪声之间需要折衷.
增强:增强边缘的基础是确定图像各点邻域强度的变化值.增强算法可以将邻域(或局部)强度值有显著变化的点突显出来.边缘增强一般是通过计算梯度幅值来完成的.
检测:在图像中有许多点的梯度幅值比较大,而这些点在特定的应用领域中并不都是边缘,所以应该用某种方法来确定哪些点是边缘点.最简单的边缘检测判据是梯度幅值阈值判据.
定位:如果某一应用场合要求确定边缘位置,则边缘的位置可在子像素分辨率上来估计,边缘的方位也可以被估计出来.
在边缘检测算法中,前三个步骤用得十分普遍。这是因为大多数场合下,仅仅需要边缘检测器指出边缘出现在图像某一像素点的附近,而没有必要指出边缘的精确位置或方向.边缘检测误差通常是指边缘误分类误差,即把假边缘判别成边缘而保留,而把真边缘判别成假边缘而去掉.边缘估计误差是用概率统计模型来描述边缘的位置和方向误差的.我们将边缘检测误差和边缘估计误差区分开,是因为它们的计算方法完全不同,其误差模型也完全不同.
最近的二十年里发展了许多边缘检测器,这里仅讨论常用的几种边缘检测器.
1、 Roberts算子 Roberts交叉算子为梯度幅值计算提供了一种简单的近似方法:
 (1)
(1)
用卷积模板,上式变成:
 (2)
(2)
其中Gx和Gy由下面的模板计算:
 (3)
(3)
同前面的梯度算子一样,差分值将在内插点处计算.Roberts算子是该点连续梯度的近似值,而不是所预期的点处的近似值.Roberts边缘检测器的试验结果见图(3) .
2、 Sobel算子 正如前面所讲,采用3*3邻域可以避免在像素之间内插点上计算梯度.考虑一下图6.2中所示的点周围点的排列.Sobel算子也是一种梯度幅值,
 (4)
(4)
其中的偏导数用下式计算:
 (5)
(5)
其中常数C=2;

 和其他的梯度算子一样,和可用卷积模板来实现:
和其他的梯度算子一样,和可用卷积模板来实现:

 (6)
(6)
请注意这一算子把重点放在接近于模板中心的像素点.图6.3和图6.4表明了这一算子的作用.Sobel算子是边缘检测器中最常用的算子之一.


上图 用于说明Sobel算子和Prewitt算子的邻域像素点标记
3、 Prewitt算子 ,Prewitt算子与Sobel算子的方程完全一样,只是常量c=1.所以

 (7)
(7)
请注意,与Sobel算子不同,这一算子没有把重点放在接近模板中心的像素点.这种边缘检测器的性能也示意在图6.3和图6.4中.
4、 各种算法比较 现在来比较一下上面讨论过的边缘检测器.我们将按照本节开头所提出的滤波、增强和检测这三个步骤,来比较各种方法.第四步定位将不讨论.首先给出在忽略滤波步骤情况下Roberts、Sobel和Prewitt边缘检测方法实验结果,如图6.3所示.对滤波后的图象进行边缘检测的结果见图6.4,其中滤波器为前一章介绍的![]() 高斯滤波器,梯度幅值的计算见方程6.3.比较图6.3和图6.4可以发现,由于噪声影响,一些假边缘也被检测出来了.
高斯滤波器,梯度幅值的计算见方程6.3.比较图6.3和图6.4可以发现,由于噪声影响,一些假边缘也被检测出来了.
图 用于边缘检测的测试图像
(a)原始图像 (b)7×7高斯滤波的图像
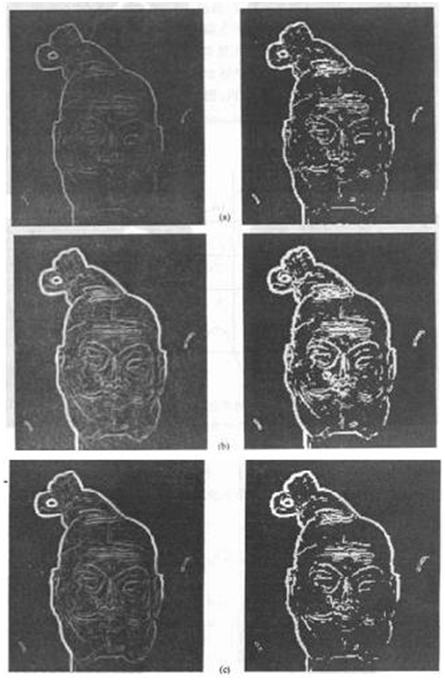
图 各种边缘检测器对未经滤波的图像(a)进行边缘检测的比较.
(c) Roberts交叉算子.(d)Sobel算子.(e) Prewitt算子.
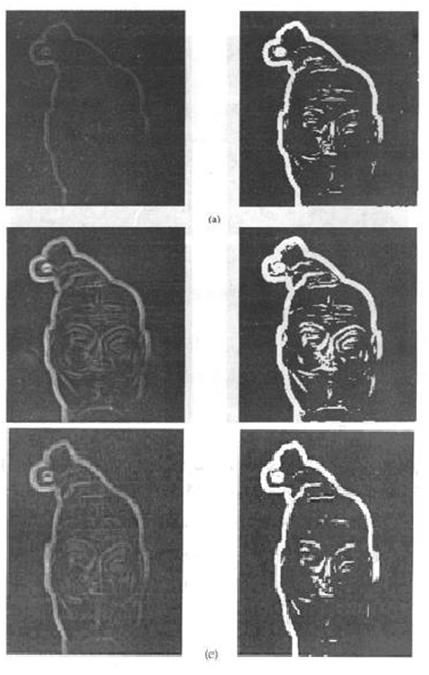
图 各种边缘检测器对滤波后的图像(图6.3 (b))进行边缘检测的结果.
(a) Roberts交叉算子.(b)Sobel算子.(c) Prewitt算子
转载自:https://blog.csdn.net/esrichinacd/article/details/14164887