
车路协同环境下的交通群体协同感知与定位技术
目录
1. 车路协同的概念
车路协同(V2X)指的是车辆和道路之间的信息交互,旨在提升交通安全、改善路况和减少碳排放。车辆可以通过V2X技术获得道路环境的状态,例如行车速度、道路状况和路口交通情况。同时,V2X技术可以使道路管理部门和交通管理中心实时监控和管理道路交通。

2. 交通群体协同感知
交通群体协同感知是指车辆之间通过V2X技术进行信息共享,从而提高交通安全和效率。具体来说,交通群体协同感知包括以下几个方面的内容:
2.1 车辆感知
车辆可以通过V2X技术获取来自其他车辆和道路环境的信息,例如前方车辆的位置、速度、加速度和转向等,以便更好地控制行车。通过信息共享,车辆可以共同感知到道路上的各种情况,从而协同应对。
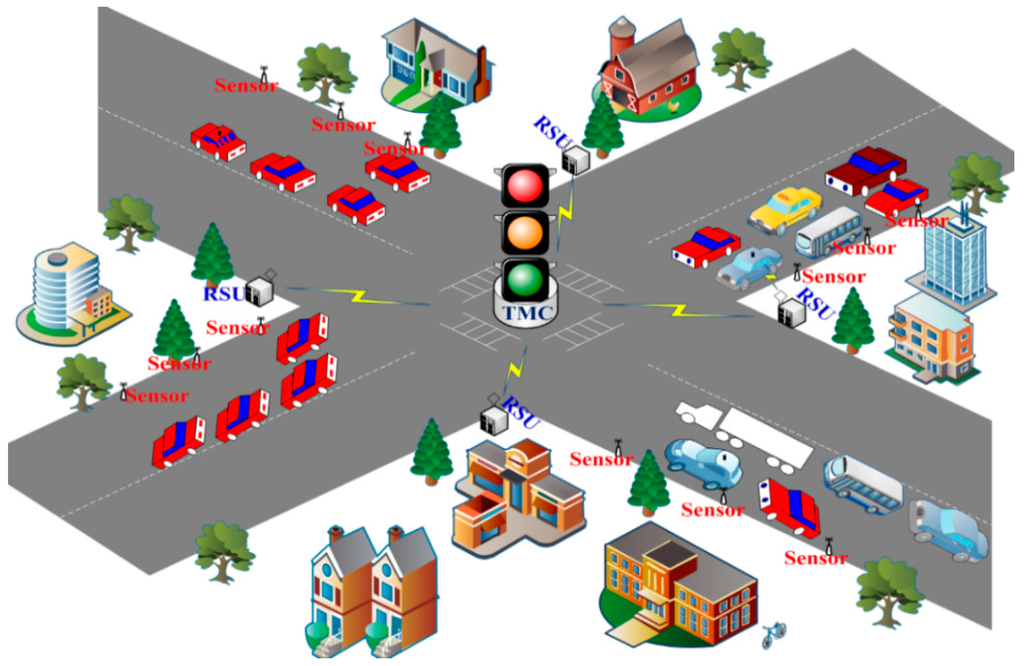
2.2 道路感知
道路感知是指通过V2X技术获取道路上的信息,包括路面状态、坡度、可行驶路线和交通信号灯等。车辆可以获取这些信息,以便更好地规划路径和避免意外情况。

2.3 群体感知
群体感知是指通过共享信息,使得车辆之间形成一种群体感知能力,从而提高交通安全和效率。例如,当一辆车检测到道路上出现危险情况时,它可以通过V2X技术向周围车辆发送警报信息,从而警示其他车辆。
3. 定位技术
定位技术是交通群体协同感知和V2X技术的重要基础。V2X技术需要准确的定位信息来实现车辆之间的信息交互和共享。当前常用的定位技术包括以下几种:
3.1 卫星导航系统

卫星导航系统是最常见的定位技术之一,例如全球定位系统(GPS)和俄罗斯的格洛纳斯系统。它们可以在全球范围内提供准确的定位信息,但在城市峡谷、室内和隧道等环境下可能存在信号干扰和误差。
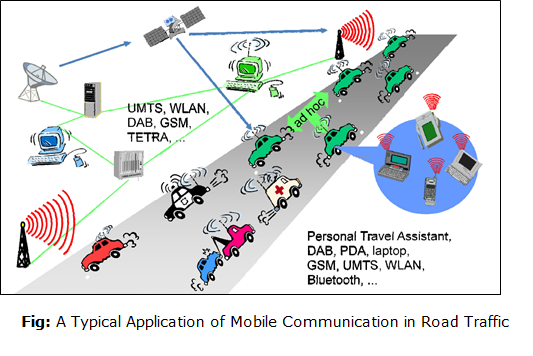
3.2 无线通信定位
无线通信定位是一种基于信号传输的技术,例如蜂窝网络和WLAN。它们可以在城市和室内环境下提供相对准确的位置信息,但其精度受到网络信号质量和环境影响。
3.3 惯性导航和传感器组合

惯性导航和传感器组合是一种基于加速度计和陀螺仪等传感器的技术。通过检测车辆的加速度和角速度,可以估算车辆的位置。该技术可以在信号缺失或信号干扰的情况下提供可靠的定位信息。
4. 车路协同环境下的交通群体协同感知与定位技术的发展趋势
随着5G技术的发展和智能汽车的普及,车路协同环境下的交通群体协同感知和定位技术将会有以下几个方向的发展:
4.1 增加感知范围和精度
未来的V2X技术将会支持更广泛和更精确的感知范围。例如,车辆可以通过5G技术获取交通信号灯和其他道路设施的信息,并在更大范围内感知其他车辆的行驶轨迹。
4.2 引入人工智能和机器学习

人工智能和机器学习技术将会被用于处理V2X技术所产生的大量数据。通过算法优化和数据分析,可以提高交通群体协同感知和定位的效率和精度。
4.3 提高安全性和隐私保护

随着智能汽车的普及,安全性和隐私保护将会是V2X技术发展的主要考虑因素之一。未来的V2X技术将会加强车辆身份验证和信号加密,以保护用户的隐私和安全。
4.4 同步发展基础设施和技术
车路协同环境下的交通群体协同感知和定位技术需要与基础设施的改进和升级同步进行。例如,要改善交通信号灯、道路设施和无线网络的覆盖范围和质量,以更好地支持V2X技术的发展。
结论
车路协同环境下的交通群体协同感知和定位技术是未来智能交通系统的重要组成部分。通过信息共享和协同作业,可以提高交通效率和安全性,并减少碳排放和交通拥堵。当前的V2X技术已经具备了一定的成熟度,未来随着5G技术、人工智能和机器学习技术的发展,将会呈现出更加强大和智能的特性。


