
DeepMap完成A轮融资2500万美元 依靠高精度地图推动无人驾驶发展
据外媒消息,地图创业公司DeepMap最近完成A轮融资,规模2500万美元,由Accel领投,加上之前由Andreessen Horowitz和GSR Ventures投资的700万美元,目前这家公司的融资总额达到3200万美元。
DeepMap是硅谷自动驾驶领域的技术公司,去年才刚刚成立,专注于高精度地图解决方案的研发。DeepMap的创始团队,由一群谷歌地图、苹果地图等知名地图产品的早期核心成员,以及激光雷达领域的技术老将组成,他们都曾在一线为自动驾驶汽车提供技术方案支持,因此DeepMap也正在朝着无人驾驶汽车领域前进。
按照DeepMap的官方阐述,其提供的是服务于自动驾驶汽车的、在复杂而不可预测的真实世界中自主导航的技术能力,这其中包括三个重要组成部分分别是高精度地图、精确实时的位置定位、服务基础架构的搭建。
说道高精度地图,这绝对是安全驾驶核心链条必不可缺的成员之一。高精度,一方面是说绝对坐标精度更高。绝对坐标精度指的是地图上某个目标和真实的外部世界的事物之间的精度。高精度地图的绝对精度一般都会在亚米级,也就是 1 米以内的精度。另一方面高精度地图所含有的道路交通信息元素更丰富和细致,例如准确的道路形状,每个车道的坡度、曲率、航向、高程等等。
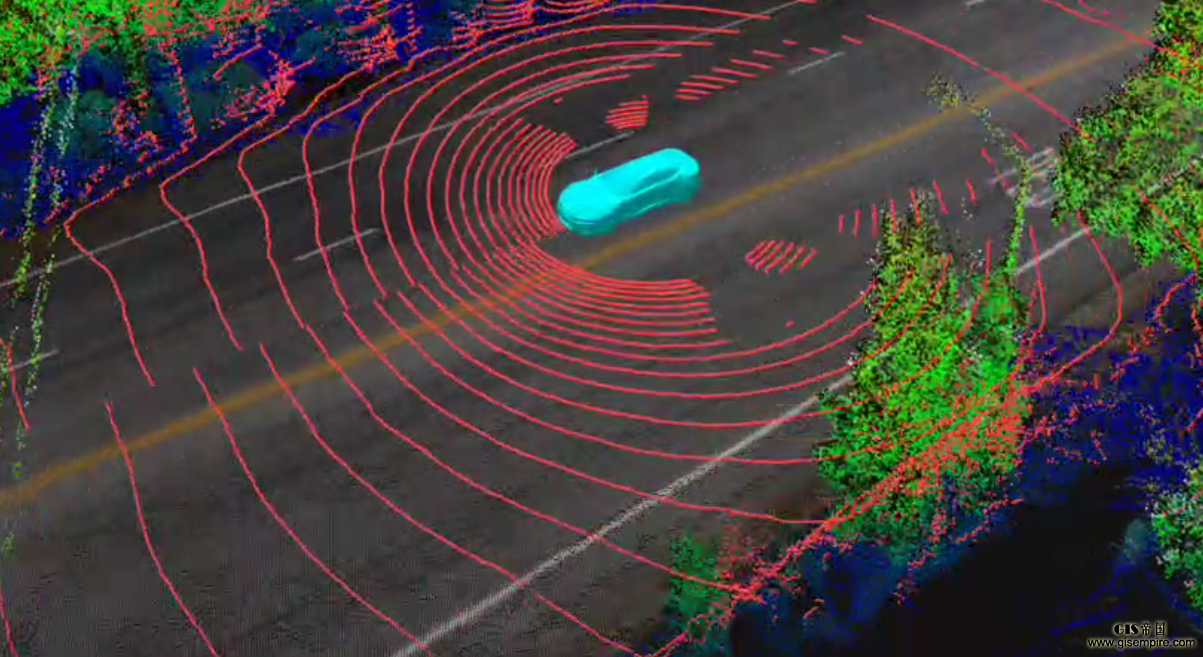
目前DeepMap的绘图技术精度可以达到厘米级,系统支持自动驾驶车辆的精准定位,同时,处于DeepMap平台中的车辆可以彼此之间共享实时信息更新。
很多人有这样的疑问,自动驾驶靠传感器还是高精度地图?相比传感器近距离感应的作用,高精度地图更着眼于对远距离的路径判断和规划。这样的意义在于,当车速过快,传感器的反应速度和感应距离不足以支撑汽车做出驾驶反应时,或者下雨天雨滴挡住传感器摄像头时,可以提前规划路径,地图的高精度性和实时性显得尤为重要。
车在自动行驶中,最关心的是车在车道中的位置,高精度地图中包含车道数量、车道线类型、车道宽度、等车道相关的属性信息,通过这些信息来完成车道的横向定位,通过视觉处理、雷达技术、定位技术,结合已知车道数量换算出汽车行驶的车道,这样来完成车道保持工作。
相对于横向定位而言,纵向定位是现在自动驾驶技术中较难的部分,需要通过高精度地图和地标的配合方式检测完成,例如车牌、电线杆这些物体,都具有全球坐标,这是绝对坐标,如果已知车牌间的距离,就能得知驾驶车辆的全球坐标,也就是通过绝对坐标完成纵向定位。
以上正是无人驾驶要面对的首要问题:由于行驶的速度很快,汽车“思考”的时间不多,要让汽车在高速行驶时可以处理交通和危险状况,它必须像人类的五官一样快速感知周边环境并作出判断。正因如此,高质量地图和摄像头技术至关重要,它们必须快速、远距离处理清晰图像。
DeepMap联合创始人兼CEO James Wu表示:“我们的目标,是帮助自动驾驶车辆变得更安全,并且使之尽早成为现实。自动驾驶汽车需要精准的绘图和定位技术支持,以建立更高的安全性和更有效的车辆决策。而高精度地图平台的部署非常昂贵、艰难且耗时,所以我们的团队希望帮助汽车类企业更快、更高效地实现他们的自动驾驶研发目标。”
资源来自网络,如有侵权请联系我删除。

