
自动驾驶汽车剖析:GIS真的在自动驾驶汽车的引擎盖下吗?
目录

GIS将在无人驾驶汽车世界中茁壮成长吗?
无人驾驶汽车通过覆盖数百万传感器返回(每秒约27,000个光点)来观察世界,并将其收集到极其精确的3D地图中。
对于汽车进行的每一次移动,它都会根据此点云数据在地理空间中的位置进行计算。
GIS技术有可能融入无人驾驶车辆的新领域。
反之亦然,GIS如何从无人驾驶汽车世界中受益?
使用LiDAR和SLAM来感知其环境
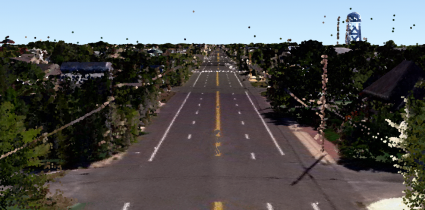
首先,让我们了解无人驾驶汽车的大脑。对于汽车每次运动,它使用激光雷达,雷达,相机和位置估算器,不断扫描360°。结合SLAM(同时定位和映射),汽车根据传感器输入实时定位其周围环境。这种观点远远优于人类所能看到的观点。
尽管人类可以轻松地感知周围的环境,但对于计算机而言,这是一项难以置信的难度挑战。例如,人类可以识别行人,交通灯和人行横道。此外,人类可以通过简单的手势预测骑自行车者和警察的移动。
这就是无人驾驶汽车使用安装在车辆上的360° LiDAR传感器的原因,它可以全面了解周围环境。随着点云数据不断被送入机器学习(ML)算法,无人驾驶汽车开始理解噪声数据。这是车辆的潜在大脑,可以从道路中提取特征。
根据被标记为训练神经网络的内容,这决定了它在路上检测物体的成功程度。从本质上讲,在各种情况下训练越多,就越能辨别出来自野生动物的行人。
精确的几何高清路网图
不断增长的趋势是无人驾驶汽车由于其不可靠性而将仅使用GPS来为车辆提供粗略的位置。例如,谷歌的自动驾驶汽车(Waymo)因其设计原则而无法依赖GPS。
无人驾驶汽车是否可以仅在没有外部信息的传感器数据上运行?换句话说,它是否需要预先加载的3D地图才能完全发挥作用?
由于安全问题,有很多理由相信自动驾驶汽车需要精确的地图。例如,如果大雪或雨覆盖车道标记,车辆需要路缘和车道尺寸才能重新开始。
事实上,像HERE Maps和TomTom这样的公司已经开始制作高清晰度(HD)地图,描绘可行驶区域的车道标记。反过来,自动驾驶汽车使用它来准确地知道它们的位置和前进方向。
任何情况下的动态路由
如果无人驾驶汽车想要从A点行驶到B点,它需要以下3件事:

- 现有的道路网络,限制他们可以旅行的地方。
- 准确的地理编码地址,以了解它们的去向。
- 一个强大的路由算法,从A到B.
出于导航目的,汽车必须计算时间最佳或最短路径。当情况在路上发生变化时,他们需要动态计算下一条路径。
他们需要地图形式的操作环境来与传感器输入进行交互。毕竟,它是在后台运行的GIS,用于决定最佳路径。但有时最佳路线并不总是最短的。这是流量最少的那个。
避免交通拥堵并遵守道路规则
随着数百万用户与Waze联系,他们在不知不觉中为社会带来了重要的利益。也就是说,他们制定了道路网络,转弯限制和交通拥堵。
与以往不同,HERE地图和Waze等公司通过众包了解城市的交通拥堵情况。所有这些都在一张地图中,通过丰富导航系统和位置数据,我们的每日通勤可以避免交通延误。
随着时间的推移,GIS可以通过了解与实时交通数据相结合的历史交通模式来优化路线。对于任何一天,它可以预测估计的交通时间并改善整体驾驶员体验。
利用物联网打造智慧城市
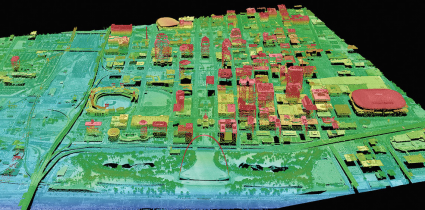
随着无人驾驶汽车开始在道路上巡逻,我们基本上有测量设备不断建立地形图。非常详细,他们捕捉路边的物体,建筑物和城市景观。智能城市需要的第一件事就是清点他们拥有的一切。因为我们可以获得准确的城市资产清单,这是改善基础设施协调的第一步。
随着越来越多的车辆在路上,这意味着它变得越来越连通和高效。现在,我们进入了互联网领域。只有单一车辆的感知,它总是会被动反应。我们不能进行任何形式的预先计划。但是,连接的车辆网络在遇到网络障碍之前是主动的。
例如,物联网将了解交通拥堵发生的地方。这不仅会传递给您的车辆,而且城市规划者也可以获得改善基础设施的信息。此外,它还将在您的日常生活中融入地理围栏。无论是安全,零售还是交付,地理围栏都可以提供实时警报并提高意识。
GIS是引擎盖下的自动驾驶汽车吗?
如今,人们依靠地图将他们带到目的地。自动驾驶汽车因其固有的空间性质也将如此。
但是他们会扫描他们的环境并将它们叠加在预先存在的地图上以确定去哪里。
尽管SLAM技术取得了进步,但目前的困境是获得精确的准确性并维护更新的地图。
由于无人驾驶汽车需要没有错误的地图,不断更新绝对空间精度,我们无法将他们预先加载的地图与他们捕获的外部世界分离。
原文:https://gisgeography.com/autonomous-vehicles-gis-self-driving-cars/


http://sildenafilo.store/# sildenafil 100mg genГ©rico
п»їfarmacia online comprar cialis online sin receta п»їfarmacia online
п»їfarmacia online: farmacias online seguras en espaГ±a – farmacia online internacional
https://sildenafilo.store/# sildenafilo 50 mg comprar online
farmacia online barata y fiable farmacia online barata or farmacias online baratas
https://www.google.com.gt/url?q=https://farmacia.best п»їfarmacia online
farmacia online barata farmacia online envГo gratis murcia and farmacia online barata gran farmacia online
farmacia 24h farmacia online madrid or farmacia envГos internacionales
https://www.google.co.ve/url?q=http://tadalafilo.pro farmacia online madrid
farmacia online internacional farmacias baratas online envГo gratis and farmacia online 24 horas farmacia online barata
http://sildenafilo.store/# sildenafilo 50 mg precio sin receta
http://kamagraes.site/# farmacia online
farmacia envГos internacionales: farmacias online seguras – farmacias online seguras en espaГ±a
sildenafilo 100mg precio farmacia comprar viagra en espaГ±a envio urgente or sildenafilo precio farmacia
http://www.hk-pub.com/forum/dedo_siteindex.php?q=<a+href=//sildenafilo.store sildenafilo precio farmacia
sildenafilo cinfa 25 mg precio comprar viagra en espaГ±a and viagra online cerca de malaga se puede comprar sildenafil sin receta
http://sildenafilo.store/# sildenafilo sandoz 100 mg precio
buy lasix 40mg lasix 40mg us generic ventolin inhalator
http://tadalafilo.pro/# farmacias online seguras
cost escitalopram 20mg buy naltrexone 50 mg online order revia for sale
https://tadalafilo.pro/# farmacias baratas online envÃo gratis
farmacias online baratas farmacia online barata or farmacias online seguras en espaГ±a
https://www.google.com.uy/url?sa=t&url=https://farmacia.best farmacia online envГo gratis murcia
farmacia envГos internacionales farmacia online barata y fiable and farmacia online internacional farmacia envГo gratis
https://sildenafilo.store/# viagra online cerca de toledo
viagra 100 mg precio en farmacias sildenafilo precio comprar viagra sin gastos de envГo
farmacia online 24 horas farmacia online envГo gratis or п»їfarmacia online
http://www.shinobi.jp/etc/goto.html?http://tadalafilo.pro п»їfarmacia online
farmacias baratas online envГo gratis farmacias online baratas and farmacia online internacional farmacia envГos internacionales
https://farmacia.best/# farmacia online madrid
farmacia online envГo gratis: farmacia online barata y fiable – farmacia envГos internacionales
https://sildenafilo.store/# sildenafilo 50 mg precio sin receta
http://sildenafilo.store/# viagra online cerca de la coruña
http://vardenafilo.icu/# farmacia online madrid
https://kamagraes.site/# farmacia envÃos internacionales
farmacia online barata farmacia barata or farmacia online envГo gratis
https://maps.google.com.mt/url?rct=j&sa=t&source=web&url=https://kamagraes.site farmacias online baratas
farmacia online 24 horas farmacia online 24 horas and farmacias online baratas farmacia online 24 horas
viagra online rГЎpida sildenafilo 100mg sin receta or sildenafilo 50 mg precio sin receta
http://chat.kanichat.com/jump.jsp?http://sildenafilo.store se puede comprar sildenafil sin receta
farmacia gibraltar online viagra comprar viagra en espaГ±a envio urgente contrareembolso and viagra online gibraltar viagra precio 2022
farmacias online baratas kamagra jelly farmacias online seguras en espaГ±a
https://sildenafilo.store/# viagra para hombre precio farmacias
farmacia online barata: Levitra precio – farmacias online seguras en espaГ±a
farmacia online barata mejor farmacia online madrid or farmacias indias online
http://jla.drmuller.net/r.php?url=https://farmacia.best:: farmacia internacional barcelona
farmacia online 24 horas farmacia online 24 horas and farmacia online envГo gratis murcia mejores farmacias online
https://farmacia.best/# farmacias baratas online envÃo gratis
http://tadalafilo.pro/# farmacia envГos internacionales
https://kamagraes.site/# farmacia barata
farmacia envГos internacionales farmacia barata or farmacias online seguras en espaГ±a
https://www.google.tt/url?q=https://tadalafilo.pro farmacias online seguras
п»їfarmacia online farmacias online baratas and farmacia envГos internacionales farmacia online barata
https://vardenafilo.icu/# farmacia envÃos internacionales
buy strattera 10mg without prescription buy zoloft 50mg online cheap buy sertraline generic
farmacia barata: Precio Levitra En Farmacia – farmacias baratas online envГo gratis
п»їfarmacia online comprar kamagra en espana farmacia envГos internacionales
farmacias online seguras farmacia online barata or farmacia 24h
https://images.google.ws/url?sa=t&url=https://kamagraes.site farmacias online seguras
farmacia 24h farmacias online seguras en espaГ±a and farmacia online barata farmacias online baratas
https://tadalafilo.pro/# farmacia barata
farmacia envГos internacionales: Precio Levitra En Farmacia – farmacias online seguras en espaГ±a
farmacias online seguras en espaГ±a farmacia online madrid or farmacia online internacional
https://www.google.ci/url?q=https://farmacia.best farmacia envГo gratis
farmacia online barata y fiable farmacias online seguras en espaГ±a and farmacias indias online farmacia barata
farmacia barata Cialis precio farmacia 24h
sildenafilo 100mg precio espaГ±a sildenafilo cinfa sin receta or sildenafilo 100mg precio espaГ±a
http://www.jazz4now.co.uk/guestbookmessage.php?prevurl=http://sildenafilo.store&prevpage=Guestbook&conf=dave@jazz4now.com  sildenafilo 100mg precio farmacia
sildenafilo cinfa 25 mg precio comprar viagra sin gastos de envГo and se puede comprar sildenafil sin receta sildenafilo 100mg precio farmacia
http://kamagraes.site/# farmacia envÃos internacionales
http://vardenafilo.icu/# farmacia online envГo gratis
https://kamagraes.site/# farmacias baratas online envÃo gratis
farmacia envГos internacionales: farmacia online envio gratis valencia – farmacias online seguras
http://farmacia.best/# farmacia online internacional
farmacia online envГo gratis farmacias online seguras farmacias online seguras
https://tadalafilo.pro/# farmacia online 24 horas
https://farmacia.best/# farmacias online baratas
https://vardenafilo.icu/# farmacia envÃos internacionales
farmacia envГos internacionales: Levitra precio – farmacias online seguras en espaГ±a
http://tadalafilo.pro/# farmacias online seguras en españa
urso pill urso 150mg brand order cetirizine 10mg online
order zithromax generic prednisolone 20mg for sale buy neurontin 100mg online
http://sildenafilo.store/# viagra para hombre venta libre
top farmacia online: farmacia online miglior prezzo – farmacia online più conveniente
farmacia online miglior prezzo avanafil prezzo farmacie online autorizzate elenco
viagra cosa serve: viagra online spedizione gratuita – viagra online in 2 giorni
comprare farmaci online all’estero: kamagra oral jelly consegna 24 ore – comprare farmaci online all’estero
viagra subito viagra online spedizione gratuita or viagra online in 2 giorni
https://cse.google.dj/url?q=https://sildenafilit.bid alternativa al viagra senza ricetta in farmacia
cialis farmacia senza ricetta cialis farmacia senza ricetta and viagra cosa serve viagra originale recensioni
farmacie online affidabili top farmacia online or farmacie online sicure
https://maps.google.cz/url?sa=t&url=https://tadalafilit.store farmacia online migliore
top farmacia online comprare farmaci online all’estero and farmacia online senza ricetta acquisto farmaci con ricetta
comprare farmaci online con ricetta: avanafil – farmacia online miglior prezzo
farmacia online piГ№ conveniente: kamagra – farmacie online sicure
farmacie online sicure: avanafil prezzo – migliori farmacie online 2023
viagra online spedizione gratuita viagra online siti sicuri viagra pfizer 25mg prezzo
dove acquistare viagra in modo sicuro: viagra prezzo – alternativa al viagra senza ricetta in farmacia
farmacia online farmacie online autorizzate elenco or farmacia online migliore
https://an0nym.xyz/?http://farmaciait.pro/ comprare farmaci online con ricetta
migliori farmacie online 2023 farmacia online and migliori farmacie online 2023 farmacia online
farmacia online: avanafil prezzo – migliori farmacie online 2023
farmacie online autorizzate elenco: farmacia online migliore – farmacie online sicure
comprare farmaci online all’estero: Dove acquistare Cialis online sicuro – farmacia online senza ricetta
farmacie on line spedizione gratuita п»їfarmacia online migliore farmacia online
farmaci senza ricetta elenco: Farmacie a roma che vendono cialis senza ricetta – farmacie online sicure
migliori farmacie online 2023: cialis generico – comprare farmaci online con ricetta
п»їfarmacia online migliore п»їfarmacia online migliore or farmacie online affidabili
https://cse.google.cv/url?sa=t&url=https://kamagrait.club farmaci senza ricetta elenco
farmacie online affidabili farmacia online miglior prezzo and farmacia online senza ricetta farmacie online sicure
farmaci senza ricetta elenco top farmacia online or farmacia online piГ№ conveniente
http://cse.google.com.sl/url?sa=i&url=http://tadalafilit.store migliori farmacie online 2023
top farmacia online farmacia online piГ№ conveniente and farmacie online autorizzate elenco farmacia online migliore
http://avanafilit.icu/# comprare farmaci online all’estero
farmacia online miglior prezzo: Farmacie a roma che vendono cialis senza ricetta – comprare farmaci online all’estero
comprare farmaci online con ricetta: farmacia online più conveniente – acquistare farmaci senza ricetta
miglior sito dove acquistare viagra viagra online consegna rapida or viagra generico sandoz
https://clients1.google.com.ua/url?sa=t&url=https://sildenafilit.bid viagra subito
viagra online spedizione gratuita viagra online spedizione gratuita and viagra originale in 24 ore contrassegno viagra 100 mg prezzo in farmacia
acquisto farmaci con ricetta: dove acquistare cialis online sicuro – farmaci senza ricetta elenco
farmacie on line spedizione gratuita farmacia online farmacia online miglior prezzo
medication for acid reductions medication that causes gas prescription for gas and bloating
farmacie online affidabili: farmacia online – farmacie online affidabili
farmacia online: kamagra gel prezzo – п»їfarmacia online migliore
buy deltasone 10mg online amoxicillin online order amoxil 250mg price
farmacia online: cialis prezzo – comprare farmaci online con ricetta
farmacie online affidabili: farmacia online migliore – top farmacia online
http://sildenafilit.bid/# pillole per erezione immediata
comprare farmaci online all’estero farmacia online migliore or п»їfarmacia online migliore
http://maps.google.com.sa/url?sa=t&url=https://farmaciait.pro farmaci senza ricetta elenco
farmacie on line spedizione gratuita acquistare farmaci senza ricetta and farmacie online affidabili farmacia online migliore
farmacia online migliore: kamagra oral jelly consegna 24 ore – farmacia online migliore
farmacie online autorizzate elenco avanafil prezzo acquisto farmaci con ricetta
farmacia online migliore: kamagra gel – farmaci senza ricetta elenco
viagra pfizer 25mg prezzo: viagra prezzo – siti sicuri per comprare viagra online
п»їfarmacia online migliore farmacia online piГ№ conveniente or п»їfarmacia online migliore
https://images.google.fm/url?sa=t&url=http://tadalafilit.store farmacia online miglior prezzo
farmacia online farmacie online sicure and farmacia online piГ№ conveniente farmacie online affidabili
farmacie on line spedizione gratuita: farmacia online miglior prezzo – comprare farmaci online all’estero
acquistare farmaci senza ricetta: farmacia online – farmacie on line spedizione gratuita
farmacia online senza ricetta farmacie online autorizzate elenco or farmaci senza ricetta elenco
http://www.debray-jerome.fr/index.php?redirect/&url=https://kamagrait.club/ farmacia online senza ricetta
farmacia online senza ricetta comprare farmaci online con ricetta and comprare farmaci online all’estero migliori farmacie online 2023
https://kamagrait.club/# acquisto farmaci con ricetta
farmacia online miglior prezzo: avanafil generico – acquistare farmaci senza ricetta
farmacia online: kamagra gel – farmacia online migliore
п»їfarmacia online migliore avanafil generico prezzo migliori farmacie online 2023
farmacia online migliore: Cialis senza ricetta – farmacia online più conveniente
п»їfarmacia online migliore: kamagra gel – farmacie online autorizzate elenco
cerco viagra a buon prezzo: sildenafil 100mg prezzo – esiste il viagra generico in farmacia
http://kamagrait.club/# acquistare farmaci senza ricetta
migliori farmacie online 2023: kamagra gel prezzo – farmacia online migliore
morning after pill buy online cure prostate infection without antibiotics medication for treating premature ejaculation
farmacia online migliore Tadalafil generico farmacie online affidabili
order promethazine pills generic stromectol 3mg ivermectin oral 0 8
can i buy clomid online: Buy Clomid Online – cost generic clomid pill
https://clomid.club/# where to buy generic clomid no prescription
can i purchase generic clomid online Buy Clomid Online where buy clomid pills
http://wellbutrin.rest/# can i purchase wellbutrin without prescription in canada
where can i get cheap clomid no prescription: Clomiphene Citrate 50 Mg – order generic clomid no prescription
https://clomid.club/# can you buy clomid prices
how to get clomid no prescription Buy Clomid Online Without Prescription where buy generic clomid prices
where to get cheap clomid for sale buying clomid without dr prescription or how to buy generic clomid no prescription
https://maps.google.si/url?sa=t&url=https://clomid.club cost of generic clomid
buying cheap clomid without dr prescription buy generic clomid without dr prescription and order generic clomid online where buy cheap clomid without prescription
buying generic clomid without dr prescription: Clomiphene Citrate 50 Mg – order cheap clomid without a prescription
http://clomid.club/# cost of clomid no prescription
get generic clomid tablets Buy Clomid Shipped From Canada can i get generic clomid price
cost of clomid without dr prescription: Buy Clomid Online – where to buy generic clomid without rx
where buy cheap clomid: Buy Clomid Online Without Prescription – can i buy clomid
http://clomid.club/# where buy clomid pills
where can i buy cheap clomid pill Buy Clomid Online where to buy clomid pill
can you get clomid no prescription: can you get generic clomid without dr prescription – how to get generic clomid for sale
https://clomid.club/# can you buy cheap clomid for sale
where to buy clomid without a prescription Buy Clomid Online buying cheap clomid
neurontin discount: buy gabapentin – neurontin canada
https://clomid.club/# order clomid no prescription
paxlovid covid paxlovid pharmacy or paxlovid generic
http://www.victoirefrance.fr/expire.aspx?Returnurl=https://paxlovid.club/ Paxlovid buy online
paxlovid for sale paxlovid for sale and paxlovid pill paxlovid price
cheap clomid pill: Clomiphene Citrate 50 Mg – get clomid now
http://clomid.club/# how can i get generic clomid
where to get generic clomid without dr prescription Buy Clomid Online Without Prescription can i order cheap clomid
http://clomid.club/# where can i get clomid pill
buying cheap clomid without insurance: cheap clomid pills – where to get clomid without rx
http://clomid.club/# can i order clomid without prescription
order generic clomid tablets Buy Clomid Shipped From Canada can i purchase generic clomid without prescription
rx clomid: clomid best price – how to buy clomid
http://clomid.club/# cost generic clomid for sale
can i get generic clomid pills Buy Clomid Online Without Prescription buying clomid without prescription
wellbutrin order online: Buy Wellbutrin XL 300 mg online – purchase wellbutrin in canada
clomid generic: Buy Clomid Online – clomid medication
https://clomid.club/# can i get clomid without insurance
buy generic clomid clomid best price clomid price
clomid generic: Buy Clomid Online – buying clomid tablets
http://clomid.club/# where to buy cheap clomid without insurance
can i get generic clomid online Buy Clomid Online generic clomid online
best otc antacid for ulcer best medicine for stomach ulcers gram negative treatment antibiotic list
https://claritin.icu/# can i buy ventolin over the counter in singapore
order generic clomid without rx: how to buy clomid online – how can i get clomid without rx
http://clomid.club/# can you buy generic clomid
can you buy clomid without dr prescription Buy Clomid Online clomid for sale
ventolin otc australia: online pharmacy ventolin – ventolin tablets uk
http://claritin.icu/# ventolin spray
cost of neurontin neurontin cost in singapore or neurontin 300 mg tablets
http://www.boostercash.fr/vote-583-341.html?adresse=gabapentin.life brand name neurontin price
cheap neurontin medicine neurontin 300 mg and neurontin capsules 300mg neurontin 300 mg cap
buy generic clomid no prescription can i order clomid without prescription or can you get cheap clomid no prescription
https://maps.google.lk/url?q=https://clomid.club can i buy generic clomid without insurance
clomid online cost of generic clomid without prescription and can i get clomid pills can you buy cheap clomid now
can i order cheap clomid no prescription: Buy Clomid Online – can i order generic clomid for sale
http://clomid.club/# where can i get cheap clomid
can i get generic clomid Buy Clomid Shipped From Canada how can i get generic clomid for sale
get cheap clomid without insurance: Buy Clomid Online – how can i get generic clomid
http://clomid.club/# where can i buy generic clomid pills
can i get clomid without dr prescription Buy Clomid Online Without Prescription where buy clomid pills
buy generic duloxetine for sale cymbalta pills buy modafinil without a prescription
how to get clomid without prescription: Clomiphene Citrate 50 Mg – can you buy generic clomid price
https://clomid.club/# how can i get cheap clomid online
can i buy generic clomid without insurance buy cheap clomid without dr prescription how can i get clomid without insurance
buy wellbutrin online without prescription: Buy Wellbutrin XL 300 mg online – wellbutrin 300 mg pill
Paxlovid buy online buy paxlovid online or paxlovid price
http://www.al24.ru/goto.php?goto=https://paxlovid.club paxlovid india
paxlovid india paxlovid price and paxlovid price paxlovid pharmacy
http://paxlovid.club/# paxlovid buy
buy paxlovid online: Paxlovid over the counter – п»їpaxlovid
http://claritin.icu/# cheap ventolin inhalers
paxlovid india http://paxlovid.club/# Paxlovid buy online
ventolin hfa 90 mcg inhaler buy ventolin inhaler without prescription or ventolin 100 mcg
https://www.coloradoballet.org/redirect.aspx?destination=http://claritin.icu buy ventolin tablets online
ventolin pharmacy australia cost ventolin australia and ventolin 2.5 mg canada to usa ventolin
paxlovid price: Paxlovid over the counter – buy paxlovid online
http://clomid.club/# order generic clomid for sale
how can i get cheap clomid without insurance order clomid pills or where buy cheap clomid now
https://clients1.google.sc/url?q=https://clomid.club where can i buy generic clomid without insurance
where to buy cheap clomid without insurance clomid without rx and where to buy cheap clomid pill where can i get cheap clomid for sale
paxlovid covid: Paxlovid over the counter – paxlovid generic
http://wellbutrin.rest/# wellbutrin generic cost
drug neurontin 20 mg neurontin buy online or neurontin 800 mg tablets best price
https://hc-sparta.cz/media_show.asp?type=1&id=729&url_back=https://gabapentin.life generic neurontin 600 mg
neurontin pills for sale neurontin capsules 100mg and neurontin 300mg caps neurontin 800 mg cost
what kills fungus on skin tricks to lower blood pressure instantly home remedies safest blood pressure medications list
http://claritin.icu/# where can i buy ventolin online
wellbutrin xr wellbutrin for sale cheap wellbutrin online
cost of clomid pill: Buy Clomid Online Without Prescription – get cheap clomid online
https://claritin.icu/# ventolin 50 mg
cyproheptadine cost nizoral 200 mg price order generic nizoral 200mg
can i get generic clomid pills: clomid best price – can you get cheap clomid no prescription
https://claritin.icu/# can i buy ventolin online
gabapentin 100mg: cheap gabapentin – neurontin tablets
https://gabapentin.life/# gabapentin generic
canadian meds without prescription canadian pharmacy online ship to usa or pharmacies with no prescription
https://maps.google.kz/url?q=https://ordermedicationonline.pro internet pharmacy list
mexican online pharmacies canada pharmacy no prescription and legitimate online pharmacies india canadian prescription drugs online
herpes pills walmart buying herpes medication online type 2 diabetes diagnosis tests
canadian pharmacy voltaren: online meds – canadian pharmacy without a prescription
http://buydrugsonline.top/# family discount pharmacy
pharmacy website india: online shopping pharmacy india – indianpharmacy com
medroxyprogesterone 5mg pills buy microzide 25mg for sale buy hydrochlorothiazide 25 mg
buying prescription drugs canada internet pharmacy no prescription or my canadian pharmacy
http://www.reddelacosta.com.ar/propiedades/gprop.php?pagina=6&modo=V&pfondo=buydrugsonline.top canadian pharmacy online without prescription
=Generic Viagra online]canadian medications canadian drugs cialis and express pharmacy online pharmacy mail order
reliable canadian pharmacy: safe online pharmacy – cross border pharmacy canada
india pharmacy mail order indianpharmacy com online shopping pharmacy india
http://mexicopharmacy.store/# pharmacies in mexico that ship to usa
reputable mexican pharmacies online buying from online mexican pharmacy or buying from online mexican pharmacy
https://images.google.ac/url?q=https://mexicopharmacy.store mexican pharmacy
mexican mail order pharmacies mexican pharmacy and mexican pharmacy mexican border pharmacies shipping to usa
buying from canadian pharmacies: certified canadian pharmacy – canadian pharmacy online
reputable indian online pharmacy indianpharmacy com or world pharmacy india
https://toolbarqueries.google.com.mx/url?sa=t&url=https://indiapharmacy.site best india pharmacy
top 10 pharmacies in india top 10 online pharmacy in india and reputable indian online pharmacy top 10 online pharmacy in india
online prescriptions canada without: cheapest online pharmacy – canadian discount cialis
http://ordermedicationonline.pro/# canada drugs without perscription
medicine to stop smoking cigarettes prescription drug for stopping smoking pain doctors that prescribe narcotics near me
amoxicillin capsules 250mg: purchase amoxicillin online – amoxicillin without a prescription
buy amoxicillin 500mg order amoxicillin online uk or prescription for amoxicillin
https://images.google.com.sg/url?sa=t&url=https://amoxicillin.best where to get amoxicillin over the counter
where to buy amoxicillin 500mg without prescription amoxicillin 500mg buy online uk and azithromycin amoxicillin can we buy amoxcillin 500mg on ebay without prescription
http://amoxicillin.best/# amoxicillin 250 mg capsule
ciprofloxacin generic price buy cipro cheap ciprofloxacin over the counter
cost of amoxicillin 875 mg: purchase amoxicillin online – amoxicillin 500mg buy online uk
order femara generic buy generic albendazole for sale abilify order online
https://lisinopril.auction/# lisinopril price comparison
zithromax online: zithromax z-pak – zithromax 500 mg lowest price drugstore online
zithromax purchase online buy zithromax canada zithromax 250 mg australia
cipro pharmacy cipro for sale or cipro 500mg best prices
http://preview.oberallgaeu-ferien.de/index.shtml?seite=mobile_lis&url=ciprofloxacin.men&id=24274 purchase cipro
buy ciprofloxacin tablets cipro 500mg best prices and ciprofloxacin generic price cipro ciprofloxacin
https://ciprofloxacin.men/# buy cipro no rx
sleep prescription online weight loss pills prescription effective weight loss pills gnc
price of zestril: Buy Lisinopril 20 mg online – zestril 10 mg in india
where can i buy amoxicillin over the counter uk can we buy amoxcillin 500mg on ebay without prescription or can i purchase amoxicillin online
https://cse.google.st/url?sa=t&url=https://amoxicillin.best amoxicillin 875 mg tablet
can you buy amoxicillin over the counter in canada amoxicillin 500 tablet and amoxicillin 500mg capsules uk amoxicillin 500 coupon
cheap zithromax pills: zithromax canadian pharmacy – buy zithromax 500mg online
buy zithromax without prescription online zithromax antibiotic buy generic zithromax online
http://doxycycline.forum/# doxycycline 250 mg tabs
zithromax for sale usa: zithromax antibiotic – how to get zithromax over the counter
generic zithromax azithromycin zithromax capsules australia or buy cheap generic zithromax
https://www.google.pl/url?sa=t&url=https://azithromycin.bar generic zithromax india
zithromax 500 mg lowest price pharmacy online zithromax order online uk and zithromax pill zithromax online paypal
doxycycline 40 mg generic cost doxycycline 40 mg generic cost or buy doxycycline us
https://clients1.google.st/url?q=https://doxycycline.forum doxycycline cost australia
doxycycline over the counter doxycycline 200 and doxycycline 100 mg pill doxycycline buy
can you buy amoxicillin over the counter can you buy amoxicillin uk amoxicillin tablets in india
oral minocin 50mg ropinirole order online how to buy requip
buy cipro online ciprofloxacin 500mg buy online or ciprofloxacin 500mg buy online
https://images.google.bs/url?q=https://ciprofloxacin.men purchase cipro
buy generic ciprofloxacin cipro ciprofloxacin and buy ciprofloxacin over the counter ciprofloxacin generic price
doxycycline online cheap: buy doxycycline over the counter – buy doxycycline without rx
generic zithromax 500mg india: zithromax coupon – buy generic zithromax no prescription
https://doxycycline.forum/# doxycycline 100mg over the counter
purchase uroxatral for sale major brand allergy pills vomiting after you take medication
buy ciprofloxacin tablets Get cheapest Ciprofloxacin online buy ciprofloxacin over the counter
100mg doxycycline: can you buy doxycycline over the counter in nz – doxycycline 100mg tablets for sale
https://ciprofloxacin.men/# ciprofloxacin mail online
Levitra online USA fast: Buy generic Levitra online – Buy Vardenafil 20mg online
super kamagra: super kamagra – cheap kamagra
Vardenafil buy online Levitra 10 mg best price Vardenafil online prescription
ed drug prices non prescription erection pills or what are ed drugs
https://images.google.pl/url?sa=t&url=https://edpills.monster best ed drugs
ed dysfunction treatment buying ed pills online and herbal ed treatment ed medication online
http://levitra.icu/# Levitra generic best price
https://levitra.icu/# Cheap Levitra online
clonidine 0.1 mg tablet catapres 0.1mg tablet buy generic tiotropium bromide 9mcg
buy Kamagra: Kamagra 100mg price – sildenafil oral jelly 100mg kamagra
pills for erection treatment of ed ed medications
buy Kamagra super kamagra or buy kamagra online usa
http://www.google.co.tz/url?q=http://kamagra.team Kamagra tablets
sildenafil oral jelly 100mg kamagra Kamagra tablets and buy kamagra online usa п»їkamagra
progesterone only pill for acne prescription acne medication names order trileptal 300mg without prescription
http://kamagra.team/# cheap kamagra
tadalafil 20mg canada tadalafil tablets price in india or tadalafil pills 20mg
https://maps.google.com.gi/url?q=http://tadalafil.trade purchase tadalafil online
tadalafil otc usa generic tadalafil for sale and tadalafil 30 tadalafil 20 mg mexico
Kamagra Oral Jelly: cheap kamagra – cheap kamagra
canadian pharmacy generic tadalafil: purchase tadalafil online – tadalafil 5mg best price
Kamagra Oral Jelly Kamagra Oral Jelly sildenafil oral jelly 100mg kamagra
https://kamagra.team/# Kamagra 100mg
sildenafil online purchase can you buy sildenafil or sildenafil india purchase
http://mcclureandsons.com/projects/fishhatcheries/baker_lake_spawning_beach_hatchery.aspx?returnurl=http://sildenafil.win cost of sildenafil in india
sildenafil 50 mg generic 100mg sildenafil for sale and sildenafil 220 sildenafil online no prescription
medication for ed erectile dysfunction drugs or compare ed drugs
https://www.google.lv/url?q=https://edpills.monster best male ed pills
cheapest ed pills online pills for ed and medication for ed dysfunction п»їerectile dysfunction medication
sildenafil generic price can i buy sildenafil over the counter in canada order sildenafil canada
ed treatment drugs: ed medications list – cheap erectile dysfunction pills
https://edpills.monster/# buying ed pills online
order amoxicillin 500mg for sale anastrozole 1 mg for sale biaxin 500mg brand
new ed pills: ed drug prices – cheap erectile dysfunction
tadalafil 100mg generic tadalafil medication tadalafil 20mg canada
Vardenafil price: Levitra online pharmacy – Vardenafil buy online
buy rocaltrol without prescription purchase tricor online fenofibrate 160mg cheap
http://indiapharm.guru/# indianpharmacy com
best erectile dysfunction pills medicine erectile dysfunction medicine for erectile
medicine in mexico pharmacies: buying from online mexican pharmacy – mexican rx online
http://edpills.icu/# ed remedies
https://edpills.icu/# non prescription ed drugs
best over the counter ed pills best ed pills erection pills online
buy ed pills online cheap ed pills or best ed drug
https://images.google.co.ve/url?q=https://edpills.icu pills for erection
erectile dysfunction drug ed drugs compared and erectile dysfunction medications erection pills
cheapest online pharmacy india: best online pharmacy india – Online medicine order
buy prescription drugs without doctor: viagra without doctor prescription amazon – tadalafil without a doctor’s prescription
mexico pharmacies prescription drugs buying prescription drugs in mexico or mexico pharmacies prescription drugs
http://channel.iezvu.com/share/mexicopharm.shop?page=https://mexicopharm.shop medicine in mexico pharmacies
best online pharmacies in mexico mexican border pharmacies shipping to usa and medicine in mexico pharmacies buying prescription drugs in mexico online
doxycycline tablets: doxycycline hyc 100mg – buy doxycycline online uk
http://withoutprescription.guru/# legal to buy prescription drugs from canada
canadian pharmacy world canadian pharmacy meds review or canadian compounding pharmacy
https://maps.google.nl/url?sa=t&url=https://canadapharm.top canadian pharmacy store
canada discount pharmacy canadian mail order pharmacy and legitimate canadian online pharmacies canadian pharmacy india
http://indiapharm.guru/# indian pharmacies safe
medicine in mexico pharmacies buying prescription drugs in mexico online mexican border pharmacies shipping to usa
buy prescription drugs without doctor real cialis without a doctor’s prescription or ed meds online without doctor prescription
https://mitsui-shopping-park.com/lalaport/iwata/redirect.html?url=https://withoutprescription.guru prescription drugs without doctor approval
prescription drugs online real viagra without a doctor prescription usa and prescription drugs without doctor approval buy prescription drugs from india
cheap essay online order suprax for sale cefixime 100mg usa
what is the best ed pill: generic ed pills – cheap erectile dysfunction pills
help with my assignment $10 no deposit bonus casinos roulette casino
buy aspirin medication online slot machines real money real money slots
https://withoutprescription.guru/# buy cheap prescription drugs online
where can i buy lamisil recommended you read online casino real money
cost tadalafil 20mg generic diclofenac indomethacin 75mg over the counter
purchase cefuroxime for sale buy generic methocarbamol buy methocarbamol tablets
tamoxifen 20mg pills buy generic rhinocort buy symbicort generic
tretinoin uk tadalafil 20mg pill avana usa
cleocin 150mg usa how to get clindamycin without a prescription buy fildena 100mg without prescription
lamictal generic lamotrigine 50mg pill purchase nemazole pill
purchase flagyl sale order bactrim 480mg cephalexin for sale online
order aurogra 50mg online cheap order generic sildalis estradiol usa
buy fluconazole 100mg pills ampicillin 250mg cheap cipro cheap
affordable dissertation writing help with research paper professional paper writers
where to buy aldactone without a prescription buy proscar 1mg buy finasteride 5mg sale
brand flomax 0.2mg flomax order buy zocor no prescription
purchase buspar generic buy ezetimibe 10mg generic order cordarone 200mg sale
order ranitidine 300mg sale order meloxicam 7.5mg for sale order celecoxib sale
order zyloprim 300mg pill buy clobetasol medication buy generic crestor
sumatriptan 25mg uk buy imitrex dutasteride for sale online
nexium over the counter oral esomeprazole 40mg topiramate medication
azelastine sprayers buy irbesartan 300mg without prescription buy avapro medication
buy famotidine 20mg for sale losartan for sale buy tacrolimus no prescription
cost xenical 60mg cost diltiazem diltiazem 180mg brand
buy cheap generic medex order metoclopramide 10mg metoclopramide where to buy
amaryl buy online buy arcoxia 60mg sale generic etoricoxib
order nortriptyline 25 mg for sale anacin order buy paracetamol pills
inderal 20mg tablet buy motrin generic plavix pills
fosamax 35mg cheap order fosamax 70mg generic macrodantin 100 mg uk
buy loratadine pill buy ramipril 10mg generic purchase dapoxetine generic
cost ozobax buy elavil 50mg toradol over the counter
purchase baclofen pills buy baclofen 10mg buy toradol paypal
coversyl uk coversyl canada order fexofenadine for sale
buy phenytoin without prescription buy cheap generic phenytoin ditropan for sale
levitra 10mg price brand lanoxin 250mg zanaflex without prescription
medrol 16 mg online methylprednisolone 16mg online order triamcinolone 10mg
roulette online for real money augmentin 1000mg without prescription levothroid over the counter
blackjack free online roulette free buy ivermectin usa
buy pantoprazole 20mg order zestril 10mg where to buy phenazopyridine without a prescription
online gambling casinos casino game buy asthma pills
slots casino games wind creek casino online games lasix 40mg price
order generic atorvastatin 40mg atorvastatin 10mg cost brand amlodipine 10mg
purchase azithromycin without prescription azipro online buy gabapentin online
omnicef order buy cefdinir online lansoprazole online
order generic accutane buy zithromax 500mg pills zithromax tablet
provigil 100mg over the counter buy prednisone 10mg sale buy generic deltasone 20mg
order generic cenforce 50mg order naprosyn 500mg without prescription buy aralen no prescription
telmisartan oral order plaquenil 200mg pill molnunat 200 mg tablet
tadalafil 10mg for sale purchasing viagra on the internet order viagra 100mg generic
omeprazole over the counter buy montelukast 10mg pills cost lopressor 100mg
buy premarin 600 mg generic buy cabergoline no prescription sildenafil generic
order latanoprost order exelon 6mg online cheap purchase rivastigmine generic
order ferrous 100 mg online order betapace 40mg online cheap betapace 40mg for sale
purchase mestinon buy pyridostigmine no prescription rizatriptan 10mg tablet
prasugrel 10 mg brand buy thorazine 100mg generic cost detrol
buy monograph 600mg online order colospa 135mg pills where to buy cilostazol without a prescription
buy generic florinef 100 mcg florinef 100mcg uk buy generic loperamide online
buy duphaston 10mg sale buy empagliflozin generic buy empagliflozin 25mg
purchase dipyridamole generic felodipine cheap order pravachol 20mg generic
buy melatonin 3mg generic order aygestin 5mg danocrine 100mg ca
acarbose ca fulvicin brand buy griseofulvin 250 mg sale
aspirin 75 mg pills how to get zovirax without a prescription buy cheap generic imiquad
minoxytop cheap flomax price buy ed medications
zaditor 1mg without prescription pill tofranil 75mg buy tofranil no prescription
order generic tadalafil 10mg viagra 50mg brand brand sildenafil 50mg
buy fenofibrate 160mg sale buy tricor 200mg pills tricor 200mg cost